基于PLC控制的通用平移机械手的设计(含任务书,开题报告,中期检查,毕业论文12000字,CAD图纸6张)
摘 要:本文将设计一台三自由度的工业机器人,用于给冲压设备运送物料。首先,本文将设计机器人的底座、大臂、小臂和机械手的结构,然后选择合适的传动方式、驱动方式,搭建机器人的结构平台;在此基础上,本文将设计该机器人的PLC控制系统,包括数据采集和步进电机的选择、反馈方式和反馈元件的选择以及控制软件的设计,重点加强控制软件的可靠性和机器人运行过程的安全性,最终实现的目标包括:实时监测机器人的各个关节的运动情况、机器人的程序编写和在线修改程序、设置参考点和回参考点。
关键词:机器人;PLC;步进电机;滚珠丝杠传动;
The Desing of Displacement Manipulator Based on PLC Control
Abstract: This paper will design a 3-dof industrial robots, used for punching carrying equipment. Firstly, this paper will design of robot arm,base, and the structure of the manipulator, forearm, then choose the suitable way, driving mode of transmission, build a robot platform, On this basis, this paper designs the robot of PLC control system, including data collection and selection of stepping motor, feedback and feedback component selection and control software design, strengthening control software reliability and safety of operation, the final target including: real-time monitoring of each joint movement of robot, robot programming and on-line modification program, set point of reference and reference point.
Key words: manipulator ; PLC control ; Stepping motor ; ball screw;
研究方案(研究目的、内容、方法、预期成果、条件保障等)
研究目的:本文研究了国内外机械手发展的现状,通过学习机械手的工作原理,熟悉了机械手的运动机理。在此基础上,确定了通用机械手的基本系统结构,对机械手的运动进行了简单的力学模型分析,对机械手的控制采用了控制方便,反应迅速的PLC编程技术,完成了机械手机械方面的设计工作(包括传动部分、执行部分、驱动部分、控制部分)的设计工作。
研究内容:
1.技术规范
1 )移置零件形状:轴类零件: 100*300
2)主要设计参数:零件重量:5kg;
2.设计任务
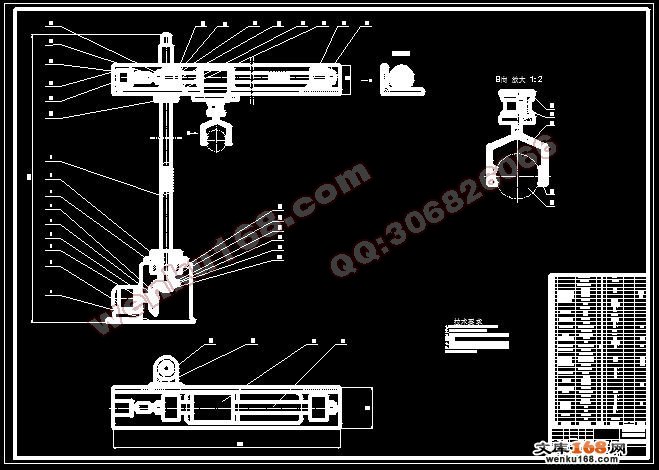
1 ) 绘制系统装配图,0号图纸一张。
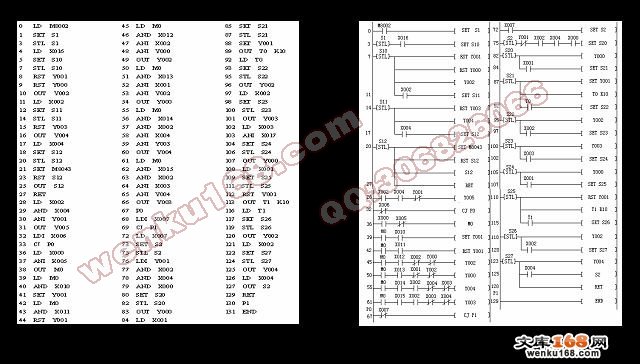
2)绘制PLC原理图,编写PLC程序,1号图纸一张。
3)测绘零件图,1号图纸2张。
4)编制设计计算说明书,不少于15000字。
3、设计要求
1)按技术规范要求的参数进行强度设计。
2)图纸绘制符合国家标准要求。
3)设计计算说明书格式符合学校的规定,内容完整、计算正确、分析深入。
目 录
摘要……………………………………………………………………………………1
关键词…………………………………………………………………………………1
1绪论…………………………………………………………………………………1
1.1前言…………………………………………………………………………… 1
1.2机械人的历史、现状………………………………………………………… 4
1.3机械人的发展趋势…………………………………………………………… 5
1.4工业机械手在生产中的应用…………………………………………………7
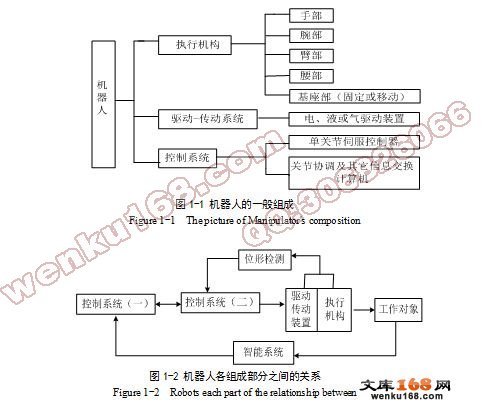
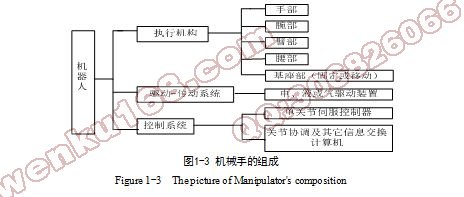
1.5机械手的组成…………………………………………………………………7
1.5.1执行机构…………………………………………………………………8
1.5.2驱动机构…………………………………………………………………8
1.5.3控制系统分类…………………………………………………………………8
2总体设计方案………………………………………………………………………9
2.1机械手的确定…………………………………………………………………9
2.2驱动机构的选择………………………………………………………………10
2.3机械手的技术参数列表………………………………………………………10
3机械手手部的计算…………………………………………………………………10
3.1手部设计时应注意的问题……………………………………………………10
3.2典型的手部结构………………………………………………………………10
3.3手部夹紧力及驱动力的计算…………………………………………………10
4 机械手臂部的设计及有关计算…………………………………………………12
4.1臂部设计时应注意的问题……………………………………………………12
4.2手臂的典型结构以及结构的选择………………………………………………… 13
4.2.1手臂的典型运动机构……………………………………………………13
4.2.2手臂运动机构的选择……………………………………………………13
4.3机械手臂部分设计………………………………………………………………13
5机身的设计计算………………………………………………………………………16
5.1机身设计时应注意的问题……………………………………………………16
5.2机身设计………………………………………………………………………17
6其他零部件的选择……………………………………………………………………20
6.1步进电机…………………………………………………………………………20
6.2轴联接方式的选择…………………………………………………………………21
7机械手PLC控制部分设计…………………………………………………………21
7.1机械手传送工件系统…………………………………………………………22
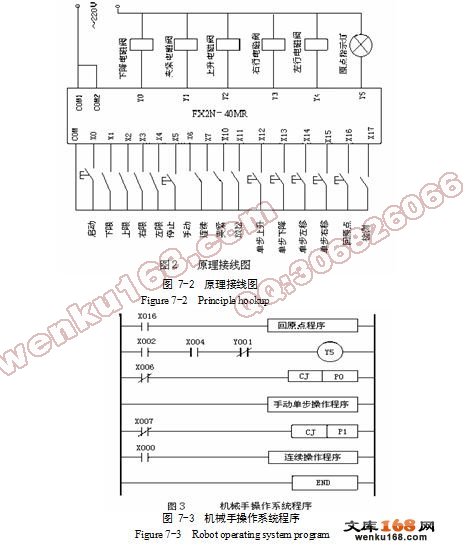
7.2输入和输出点分配表及原理接线图…………………………………………22
7.3操作系统………………………………………………………………………23
7.4回原位程序……………………………………………………………………24
7.5手动单步操作程序……………………………………………………………24
7.6自动操作程序…………………………………………………………………24
7.7程序梯形图……………………………………………………………………25
7.8程序语句指令表………………………………………………………………27
8结论…………………………………………………………………………………27
参考文献 ……………………………………………………………………………28
致谢…………………………………………………………………………………29
附件清单……………………………………………………………………………29
|