Abstract
ABSTRACT
In this research ,we focused on developing a rehabilitation robot for rehabilitation of locomotion in stroke and spinal cord-injured(SCI) individuals.In the traditional way of training,the leg movement of the patient has to be assisted by the physiotherapist.The physical capability and the individual experience of the therapist usually limits this type of training.In this paper ,we combined the exoskeleton technology and the rehabilitation training to develop a robot for helping the physiotherapists disengage from the heavy training work.This robot also call automatically record the training data ,which call be used to analyze and evaluate the therapeutic effect in training process by physiotherapists.
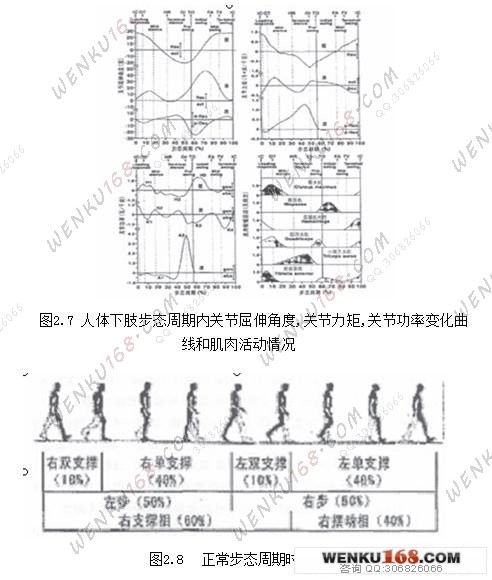
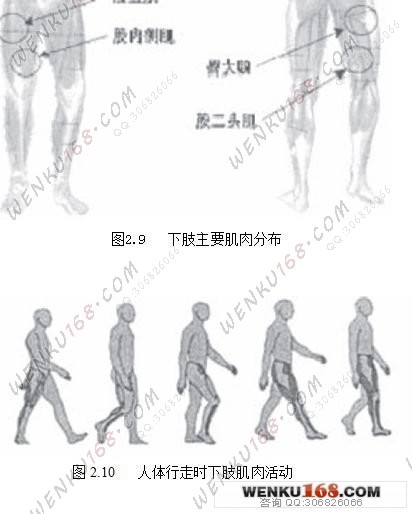
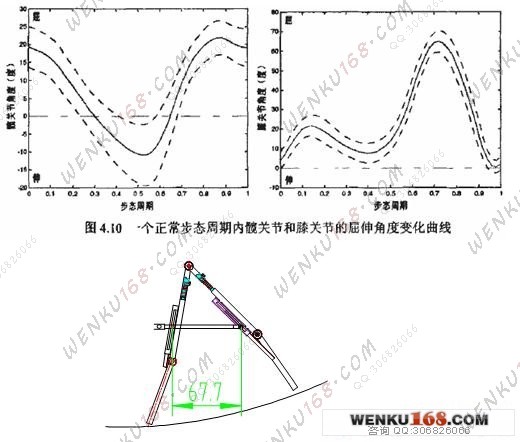
This paper firstly introduced the mechanism of human lower extremity musculoskeletal movement and the rehabilitation training methods of the stroke and SCI patients for design of mechanical structure of the robot.
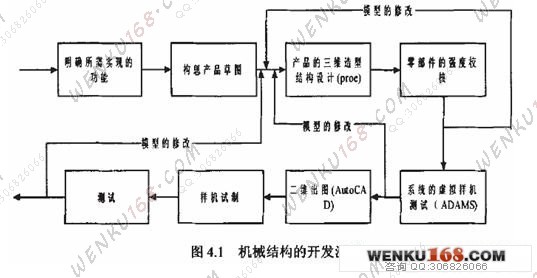
Based on the Lagrange kinetic equation we built a dynamic model of Bipedal Walking for developing the control strategies of the robot.Then we designed the mechanical structure of the robot and used the three—dimensional parameter software Pro/E to set up the model of the robot.Finally with the interface between Pro/E and
ADAMS software.we inputted the robotics prototype into ADAMS to do dynamic simulation.
In addition,a control strategy of the robot Was explored ,and the prototype of the experimental system was developed to verify our theoretical outcomes and
further experiments will be performed on it.